|
Most dancers don't need to keep notes about moves and sequences—they need to remember enough moves to preserve variety on the dance floor, and their kinaesthetic memory allows them to do so without any artificial aids. However, some dancers find that they need or want to keep a more permanent record of moves and choreographies that they have encountered. There are many reasons why this might be useful:
To be as useful as possible, a dance notation system needs to be:
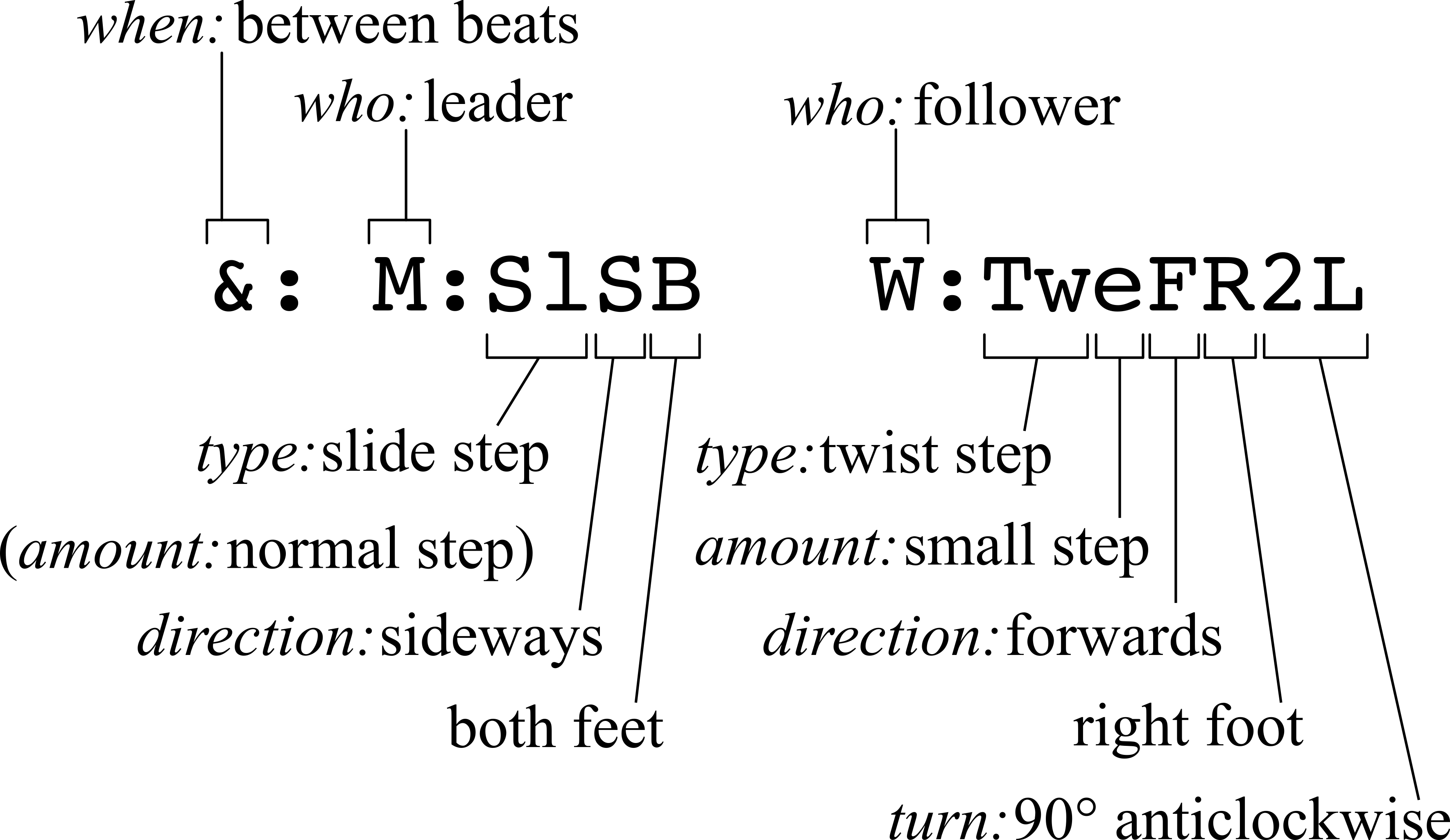
Of course, the last two of these criteria are diametrically opposed to the first two, so any notation system is necessarily a compromise that depends on the particular situation. For modern dancers, where the dance involves a vast range of possible movements, and where its practitioners are typically full-time professionals, a complex system like Labanotation may be worthwhile. For social swing dancers, a more simplistic system is better suited to the task. This chapter describes a notation system for swing dance which tries to achieve this balance. It is adapted (and simplified) from the system described in Craig Hutchinson's "Swing Dancer" manual (see the Books chapter), and is reliable enough that it was possible to generate most of the content in this book from ten-year-old notes written in the system. The main limitation of the system is that it only describes footwork; it does not include notation for body positions or for hand and arm movements. However, in practice including descriptions of these elements in English normally suffices. Each step is described with a code, and the code breaks down into several parts:
Who and When
The first part of a move code describes when a step happens, and who takes it. When a step happens is just the
number of the beat (
Step BreakdownThe first part of a code that describes a movement indicates what kind of step it is. This part is optional: if it is not present, then the code just describes a normal step. The type of the step normally also determines whether the dancer changes their weight from one foot to the other (however, this is sometimes overridden by the direction code below).
The size of the step can also be indicated, although only roughly: a small-sized step, or a normal sized step. Again, this part of the code is optional: if it is missing, the step is normal-sized.
The next part of a move code is the direction that the step is performed in. These are mostly as described in the Step Movements section, but there are a couple of additions. In particular the
The direction of a step is accompanied by the foot that performs the step. This will normally be the foot
that is free (i.e. has no weight on it), but there are some exceptions to this. For example, a jumping step
(
The final part of a step code describes any rotation that the dancer performs. This includes the amount of rotation, as a number of 45° increments, and the direction of the turn.
Examples
A simple example in this notation system is
A more complicated example is |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||